Przedstawiamy elektropneumatyczny pojazd robotyczny wykonany przez Mateusza Wojciechowskiego z klasy 2TM1. Pojazd został częściowo wykonany z gotowych elementów, częściowo (np. mechanizmy różnicowe) wydrukowano na drukarce 3D.
Opis pojazdu:
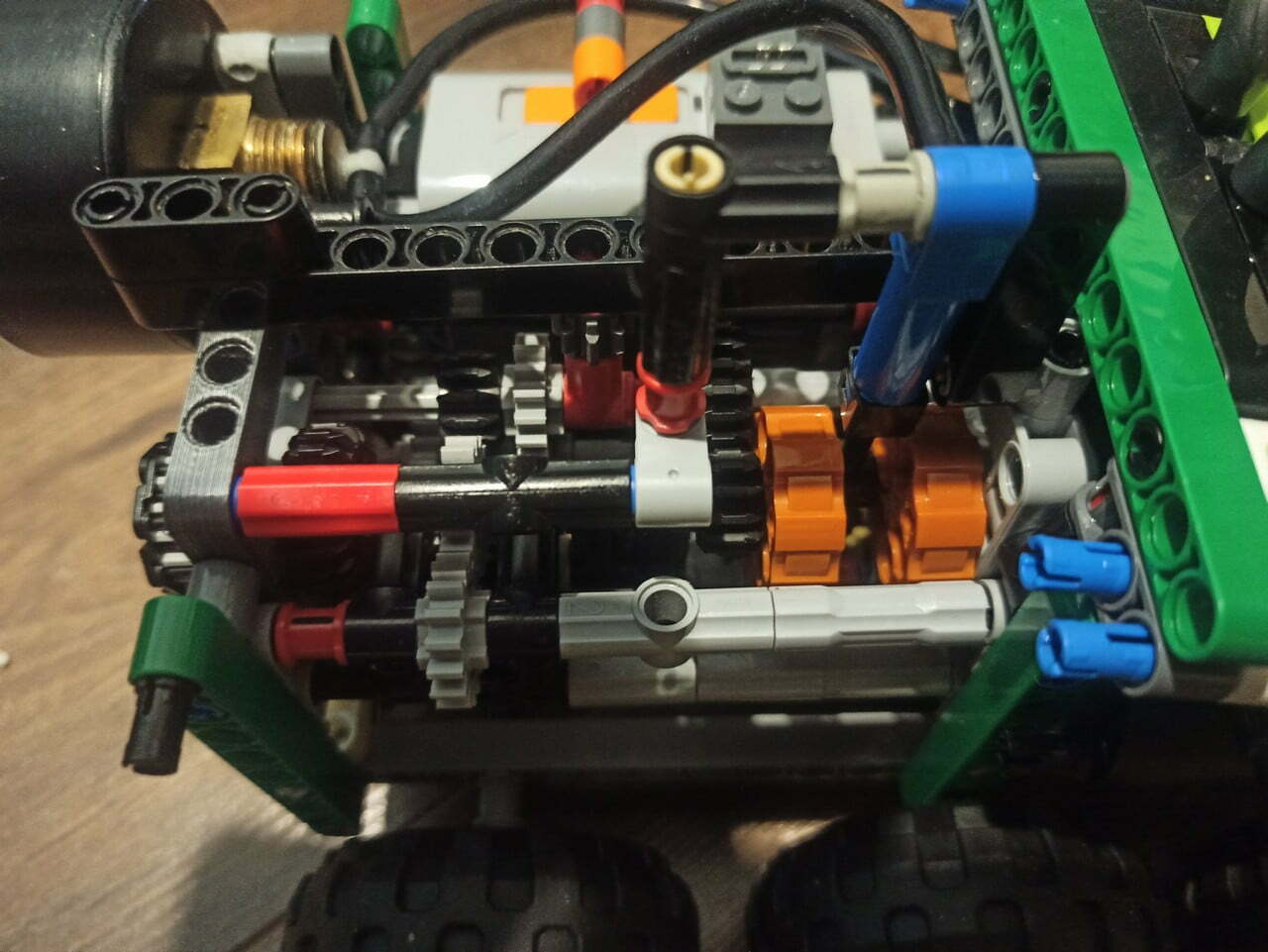
Pojazd ten posiada 3 stopniową skrzynię biegów załączając kolejno:
-1 bieg- napęd,
-2 bieg- obrót ramienia,
-3 bieg- pompka.
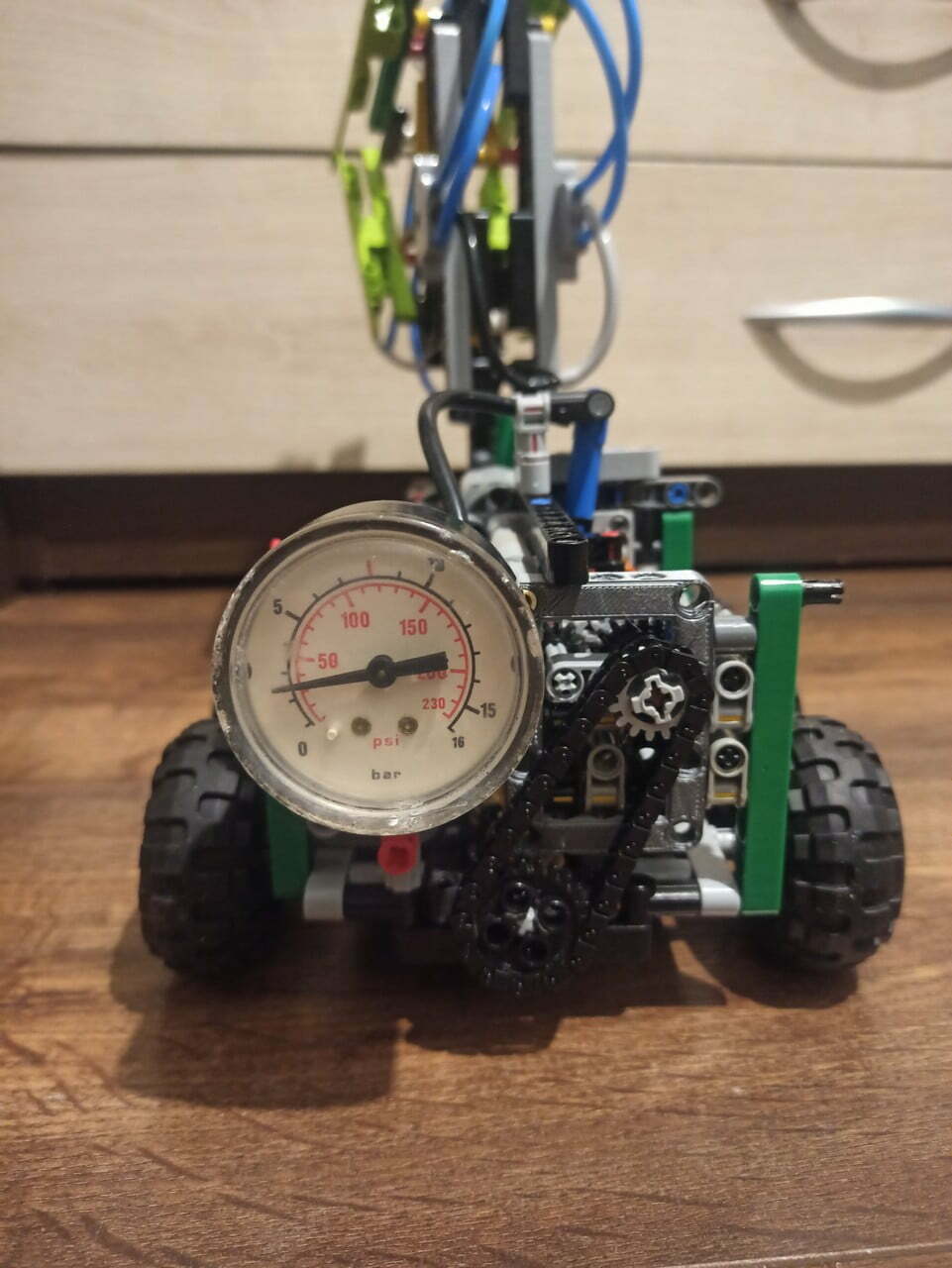
Zmiana biegów odbywa się poprzez ruch koła zębatego zwanego ślimakiem który przesuwa wał załączający biegi. Dzięki zastosowaniu skrzyni biegów pojazd ten posiada tylko dwa silniki elektryczne sterowane przez podczerwień. W tylnej części pojazdu znajduje się manometr wskazujący ciśnienie w układzie pneumatycznym oraz przekładnia łańcuchowa służąca do przeniesienia momentu obrotowego na sześć tylnych kół z mechanizmem różnicowym. Ramię ma możliwość obrotu o 360 stopni oraz chwytania przedmiotów.
Gratulujemy Mateuszowi za jego zaangażowanie w wykonywanie projektów mechatronicznych.